-
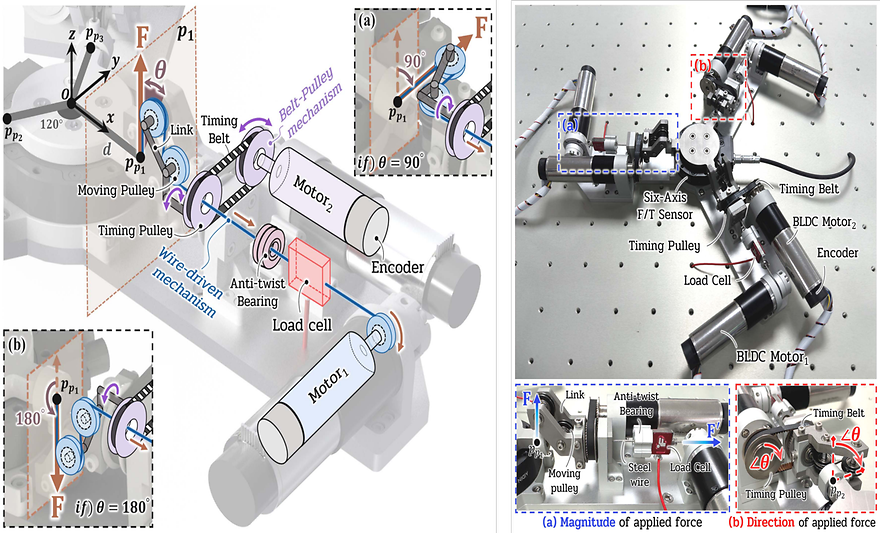
우리 학교 기계공학과 김의겸 교수팀이 다양한 힘 조합이 가능한 자동화 로봇 보정 장치를 개발했다. 이에 로봇의 센서로 널리 활용될 수 있을 전망이다.연구 내용은 ‘다축 힘토크 센서의 정밀 보정용 다양한 힘 조합이 가능한 자동화 로봇 보정 장치(Automated Calibration Robotic System Capable of Producing Versatile Force Combinations for Multiaxis Force/Torque Sensors)’라는 제목으로, 자동화 및 제어 분야 저명학술지인 <IEEE 산업정보학학회 저널(IEEE Transactions on Industrial Informatics, IF: 12.3, JCR%=2.3%)에 지난 13일 게재됐다.이번 연구에는 아주대 기계공학과 대학원 황진학 학생(석사과정)이 제1저자로, 이우성·이세란 학생이 공동저자로 참여했다. (주)에이딘로보틱스 김용범 박사(공동저자)와 김의겸 교수(교신저자)도 함께 참여했다.6축 힘/토크센서는 휴머노이드 및 다양한 로봇 시스템에서 중요한 구성요소이다. 하나의 센서에서 6축의 모든 힘을 측정할 수 있기 때문에 로봇이 섬세한 힘 제어가 가능하다. 하지만, 현재까지 이를 자동으로 보정할 수 있는 시스템이 존재하지 않았기 때문에 매번 사람이 수작업으로 보정 작업을 수행해야 했다. 센서 초기 데이터를 원하는 힘의 단위로 변환 시켜주기 위해서는 보정 작업이 필요하다. 때문에 센서의 가격이 높아지고, 로봇 센서보편화에 한계로 작용해왔다. 6축 힘/토크의 보정은 단순히 한 축 방향의 힘만을 분석하는 것이 아니라, 6축 축방향의 모든 힘의 비선형성과 축간간섭현상(crosstalk phenomenon)을 고려해야 하기 때문에 고난도의 기술력을 요구한다. 이를 자동화 시키는 것은 더욱 도전적인 문제이기 때문에, 그동안 힘 센서 연구 활동은 많았지만 현재까지 이를 완전히 해결하지는 못했다.아주대 김의겸 교수 연구팀은 원천적인 새로운 메커니즘 개발부터 디자인, 제어, AI, 구현까지 원천 및 응용 기술 개발을 진행했다. 이를 통해 6축 힘/토크에 대한 모든 조합을 구현하면서도 로봇 자동화가 가능한 로봇 시스템을 개발했다. 3개의 수직력과 3개의 수평력을 사용하여 6축 힘/토크를 생성하는 새로운 원리를 제안한 것. 국내에서 협동로봇시장이 확대됨에 따라 로봇 및 인간의 안전 문제를 해결하기 위해 로봇용 센서는 필수적인 구성 요소가 될 것으로 보인다. 이에 아주대 연구팀의 연구 성과가 시장 확대에 기여할 수 있을 전망이다. 김의겸 교수는 "공학자로서 사람들의 삶을 더 윤택하게 하는데 도움이 될 연구를 이어가고 싶다"며 "학술적으로 가치가 높으면서도, 실제 산업과 사회에서 쓸모있는 기술을 개발하기 위해 노력할 것"이라고 말했다.이번 연구는 산업통상자원부의 로봇산업핵심기술개발사업의 지원으로 수행됐다.#위 사진 설명 : 왼쪽부터 기계공학과 김의겸 교수와 기계공학과 석사과정 황진학 학생
-
145
- 작성자통합 관리자
- 작성일2024-04-05
- 8701
- 동영상동영상
-
-
143
- 작성자통합 관리자
- 작성일2024-04-05
- 9078
- 동영상동영상
-
아주대 연구진이 인간 생체 시각을 모사해 자외선 영역의 광 데이터를 판별할 수 있는 지능형 광 신경 소자를 개발하는 데 성공했다. 이번 연구는 인공 신경형 시각 장치뿐 아니라 화재 감지를 비롯한 안전 관리와 의료 등의 분야에 활용될 수 있을 것으로 기대된다. 서형탁 교수(첨단신소재공학과·대학원 에너지시스템학과, 사진 오른쪽)와 쿠마 모히트(Kumar Mohit, 대학원 에너지시스템학과, 사진 왼) 교수 연구팀은 자외선 이미지 신호를 감지해 비휘발성 형태 데이터로 저장하고 판별할 수 있는 지능형 광 신경 소자를 개발했다고 밝혔다. 이 소자는 고신뢰성 갈륨 산화물을 활용해 노이즈가 매우 낮고 높은 민감도를 갖추고 있다. 관련 내용은 ‘주의 기반 사물 식별을 위한 적응형 광 인공 뉴런(Adaptable photonic artificial neurons for attention-based object identification)’이라는 논문으로 나노 분야 저명 학술지 <나노 에너지(Nano Energy)> 1월 온라인판에 게재됐다. 아주대 대학원 석사과정의 김준모·김지수 학생도 연구에 함께 참여했다. 인간의 시각 인지 시스템은 실시간으로 광학 신호를 감지하고 포착해, 광 자극의 세기나 반복에 따라 광 신호를 차별적으로 인식한다. 또 받아들인 정보를 장·단기로 선택 저장할 뿐 아니라 중요 정보인지 아닌지를 판단할 수 있는 능력을 가지고 있다. 이 과정은 인간의 시각이 광학 정보를 포착, 광전 변환을 통해 적절한 크기의 전기 스파이크로 인코딩하는 경로로 이루어진다. 해당 정보는 뇌의 시각 피질로 전송되어 생체 시냅스의 네트워크에 저장된다. 이렇듯 광 신호 감지와 정보 저장을 일체화한 생체 시각 인지 방식을 모사해 소자화하게 되면 CCTV 등의 기기를 통한 지능형 시각 정보 처리가 가능해진다. 그러나 현재 기술에서는 광 센서와 정보를 저장하는 메모리 소자가 분리되어 있다. 또 광 신호의 의미를 파악하기 위해 신호처리 소자도 별도로 필요해, 지능형 CCTV 등을 통한 고차원적 영상의 처리를 위해서는 복잡한 하드웨어의 구성이 필연적이다. 복잡한 회로를 단순화하기 위해서는, 다양한 환경에 적응할 수 있고 정보를 차별적으로 판별·저장할 수 있도록 신호처리와 메모리 저장 기능이 통합되어야 한다.아주대 연구팀은 기존의 한계를 극복하고, 최근 들어 활용 폭이 넓어지고 있는 자외선을 기반으로 지능형 광센서를 통합 구현하기 위해 차세대 고전력·고신뢰성 반도체 소재로 연구되고 있는 갈륨 산화물(Ga2O3)을 주목했다. 연구진은 30나노미터(nm) 두께의 갈륨 산화물 박막을 광감지층으로 실리콘 기판 위에 증착한 광 다이오드 소자를 개발하는데 성공했다. 기존에 활용되던 갈륨 산화물층은 단결정 구조로 마이크로 미터(μm) 수준의 두꺼운 층이었으나, 연구팀은 실리콘 기판에 박막을 형성하여 기존 실리콘 집적회로에 통합시킴으로써 30나노미터 상당으로 두께를 줄일 수 있었다. 서형탁 교수 연구팀은 광전류를 인공 신경의 신경전달물질과 같은 ‘자극’으로 활용하기 위해 광활성이 높은 베타상 구조의 박막에 인위적으로 박막 전체적으로 균일하게 분포한 결함을 도입했고, 각 결함의 물리적 근원을 규명했다. 또 광전하가 이 결함에 포획됨에 따라 광전류의 크기가 자극의 시간과 횟수에 의하여 강화 또는 약화 되는 학습기능을 구현하는 데 성공했다. 이는 인체 시신경의 작동원리와 유사하다. 이번에 개발한 광소자를 통해 연구진은 생체 시각 인지에서 반복 노출과 강한 노출의 정보에 따라 정보를 차별적으로 판단·저장하는 여러 기능을 모사해냈다. 0.001초 단위로 입력되는 자외선 광 펄스 신호를 장기적으로 강화 또는 약화시켜 인공지능형 비휘발성 메모리 저장 및 프로그래밍을 구현할 수 있음을 보였고, 광신호의 세기와 전압 극성 및 크기를 변수로 하여 다수준(multi-level)으로 광신호를 저장·판별할 수 있다는 점도 확인했다. 연구팀은 실제 개발된 소자의 3x3픽셀 어레이를 구성하여 간단한 문자 판별을 시연, 이미지 판별이 가능함을 확인했다.서형탁 교수는 “현재 기술 수준에서 인간의 시각 인지 시스템을 집적회로 소자로 구현하기 위해서는 굉장히 복잡한 구조의 설계가 필요하다”며 “이번 연구를 통해 대표적인 고신뢰성 차세대 전력 반도체 소재인 갈륨산화물을 이용, 소자 레벨에서 보다 단순화된 메모리 통합형 광 센서를 개발해낸 것이 매우 의미 있는 성과”라고 전했다. 서 교수는 “이번에 개발한 광 신경 소자는 앞으로 자외선 영역의 인공지능형 광인지 시스템 개발에 활용될 수 있을 것”이라며 “추가 연구와 개발을 통해 궁극적으로는 지능형 화재 감지를 비롯한 안전 분야와 의료 및 자외선을 이용한 소재 합성이나 오존 살균 장치 등의 분야에서 널리 활용이 가능할 전망”이라고 덧붙였다. 이번 연구는 과학기술정보통신부·한국연구재단 주관 PIM인공지능반도체핵심기술개발사업과 중견 기초연구지원사업의 지원으로 수행됐다.A: 인체 시각신경과 유사하며 광신호의 세기에 따라 인지할 수 있는 정도 조절B: 위는 단면 전자현미경 사진이며 아래는 확대된 원자결정 사진C: 레이저 광 조사 하에서 광전류가 어디에 형성되는지 전류 멥핑을 이용하여 관측D: 문자 C와 T를 혼합하여 광입력 신호를 주었을 때 광 센서의 프로그램을 통해 C를 인지하거나 혹은 T를 인지 및 저장할 수 있고, 이를 적절한 시간 내에서 지우게 할 수도 있다.
-
141
- 작성자통합 관리자
- 작성일2024-02-15
- 9010
- 동영상동영상
-
-
139
- 작성자통합 관리자
- 작성일2024-01-11
- 9806
- 동영상동영상
-
-
137
- 작성자통합 관리자
- 작성일2024-01-11
- 9806
- 동영상동영상